Dashboard
Use the Radar dashboard to manage, explore, and analyze your Radar data, such as geofences, users, events, and trips.
The dashboard can also be used to configure integrations, project settings such as enabled features (e.g., places) and event types (e.g., user.exited_place), and custom data retention windows.
Simulator#
The simulator is the easiest way to generate location updates to test and visualize entry and exit events at will. Gone are the days of needing to drive around or download spoofing apps to try out location-enabled features. The simulator acts as a playground to experiment with our API without any code!
How it works#
Click around the map to generate locations and events. The activity feed is populated in real-time to mirror how our APIs would surface locations and events in your app. The data generated flows through to your enabled integrations in the corresponding environment. The locations and events generated abide by your project's settings and will persist across the dashboard. To avoid any production side effects, use the test environment with the default user provided (
simulated-user-id).Simulate a target user. To simulate a given user, click into that specific user on the users page and hit the "Simulate" button. You can also set custom user metadata, app-specific information that downstream systems can act upon, such as whether a user has been activated or membership in a target cohort.
Simulate a trip. There are 3 fields necessary to simulate a trip:
externalId,destinationGeofenceTag, anddestinationGeofenceExternalId. You can enter them manually or select a geofence on the map and click "Set as trip destination" to autofill these values. Then, click "Start Trip" to officially kick off and activate the trip! As you click around, you'll notice events such asuser.approaching_trip_destinationanduser.arrived_at_trip_destination.
User Activity#
The User Activity page is the most straightforward way to debug a user's recent locations and events. Navigate to the Users page and select View within the desired user row. Then, click View Activity. Filter the user's recent activity down to the minute to investigate why events did or did not fire, and understand confidence levels for events in real-world scenarios.
How it works#
See a unified view of locations, events, and geofences. The User Activity map displays a user's recent locations and events alongside geofences to pin down exactly when entries and exits occurred.
Focus on an individual location or event. Hover over a row in the Activity Feed to center the map view around those coordinates and to display the accuracy bubble for that location or event. An Event's confidence level is a function of the accuracy of the location and the geometry of the geofence. The smaller the geofence and the less accurate the location, the lower the confidence.
Filter to a specific time period. Move the bounds of the slider to isolate a range of time for investigation. The slider supports granularity down to the minute.
Location sources#
FOREGROUND_LOCATION: location update triggered byRadar.trackOnceBACKGROUND_LOCATION: location updated triggered byRadar.startTrackingGEOFENCE_ENTER: location update triggered by a client-side geofence entry, either nearby geofences synced from the server or a "bubble" geofence around the device's current locationGEOFENCE_EXIT: location updated triggered by client-side geofence exit, either nearby geofences synced from the server or a "bubble" geofence around the device's current locationBEACON_ENTER: location update triggered by a client-side beacon entryBEACON_EXIT: location update triggered by a client-side beacon exitVISIT_ARRIVAL(iOS only): location update triggered by an arrival from the iOS visit monitoring serviceVISIT_DEPARTURE(iOS only): location update triggered by a departure iOS visit monitoring serviceMANUAL_LOCATION: location update triggered byRadar.trackOncepassing in a location not collected by the Radar SDKMOCK_LOCATION: location update triggered byRadar.mockTracking
Place matching#
Place matching is the simplest way to make sure your geofence coordinates and geometries are accurate and stay up-to-date over time. Cleaning your geofence datasets via Radar's import process will reduce false positives. Entry and exit events will be more reliable, trip approaching and arrived signals will be more accurate, and messaging for nearby locations will be more relevant.
Navigate to the geofences page and select Import. If places are enabled for your project, opt-in to this feature by toggling on Enable place matching. Select chains to match your geofences against. The import process will attempt to match each geofence against Radar's places for those chains.
How it works#
Import your geofences against Radar's places data. Upon importing your geofences into Radar, select chains to match your geofences against. By default, Radar will search for places for those chains within 10 kilometers (~6 miles) of each geofence and match to the nearest location. The search radius can be configured as an advanced option at the time of import.
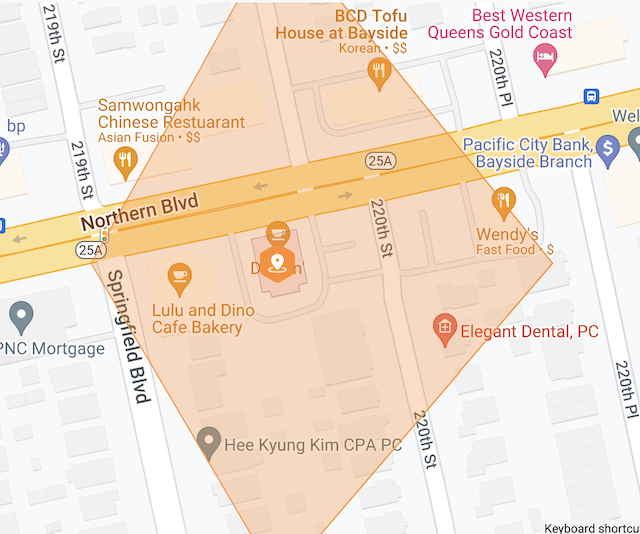
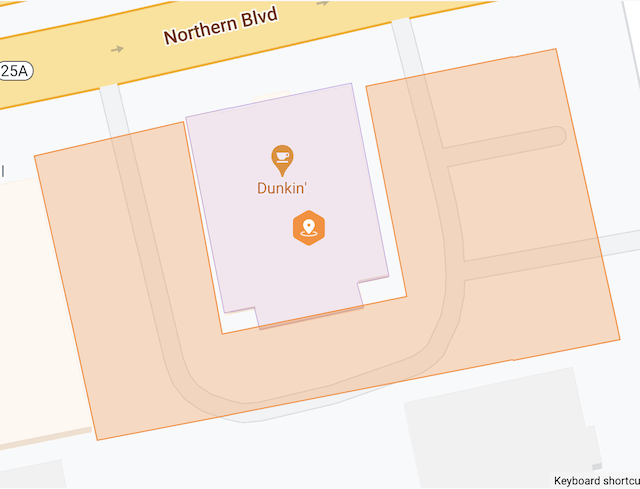
View the results of the place matching import. After the import has completed, examine the results on the import history page. Click View import to see a summary as well as logs that indicate the outcome for each row. If the place match was successful, the import log will contain details such as a link to the Radar place and the distance that the geofence center was corrected. Select Expand all to display the input data and a map UI representing the transformation.
Filter and export the results for further analysis. To perform more granular investigations, apply Filters to isolate rows that were not place matched, geofences that have large center correction values, or errors. Click Export rows to download a CSV of the filtered results to perform additional analysis in other tools.
Geofence types#
Circle#
By default, when a circle geofence is matched, the geofence will take on the geometry of the Radar place. As an advanced option, a geofence can adopt the center of the Radar place only, while retaining its original geometry. This behavior can be toggled by editing the geofence after the import.
Isochrone#
When an isochrone geofence is matched, the geofence will only adopt the center of the Radar place, regenerating the isochrone geometry from the new center.
Polygon#
When a polygon geofence is matched, the geofence will be linked to the Radar place, but not adopt the place center or geometry. This behavior supports geofences that represent areas such as parking lots and drive-thru lanes.
Advanced options#
- Search radius. By default, place matching will look for the nearest location within 10 kilometers, the maximum radius provided by the search places endpoint. This value can be reduced to enforce a tighter search distance.
- Geofence tag(s). Filter the rows for which place matching is attempted. For example, only perform place matching on rows where the tag is
storebut notparking lot. - Use Radar's place geometry. By default, if a place match is found, circle geofences will adopt both the center and geometry of the Radar place. This behavior can be changed so that circle geofences only take on the center but not the geometry.